|
Installation.
Beskrivningen är väldigt detaljerad men man måste även själv vara noggrann och
observant. Det är lätt att några fall ha för bråttom och då kan det lätt bli fel.
Om lampan inte tänds, skifta anslutningen för lampan så svart kommer år höger sett i armens riktning.
På samma sätt får man göra om armen inte rör sig i avsedd riktning.
Efter att ha testa med den medföljande kontrollenheten så bytte jag till kontrollenheten för USB.
För Raspberry Pi behövs följande installeras:
sudo git clone https://github.com/walac/pyusb.git
cd pyusb
sudo python setup.py install
Avsluta med att starta om Raspberry Pi:
sudo reboot
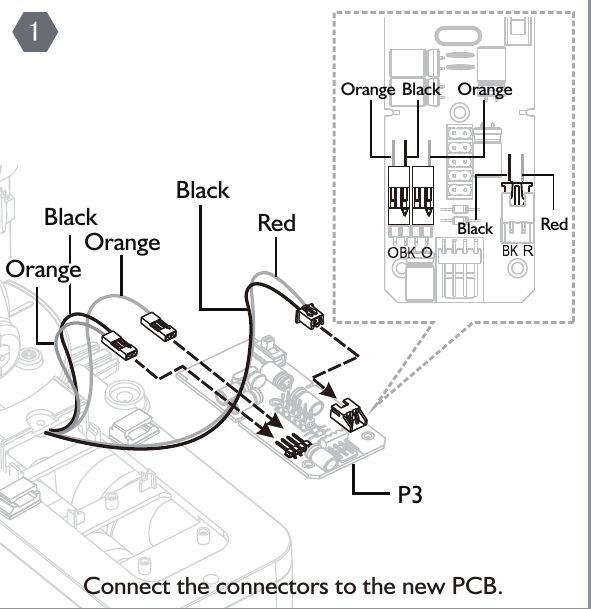
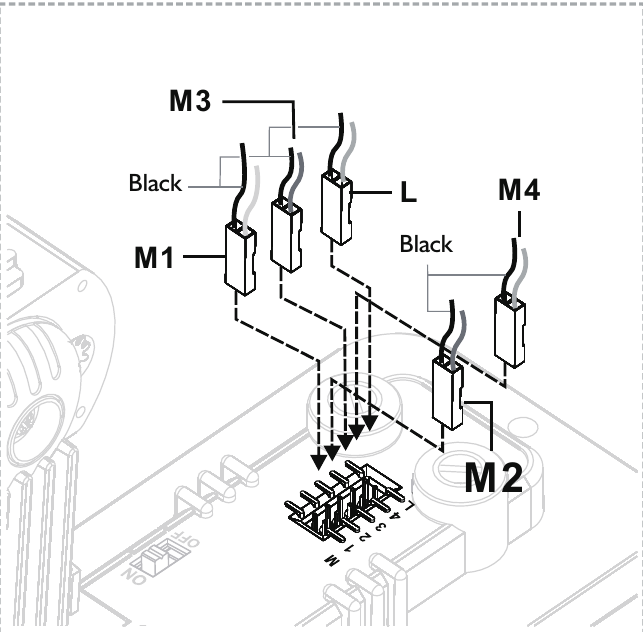
Inkoppling.
Inkoppling av USB-kontrollern.
Ledningarna ska kopplas in med svart mot P2.
Testning.
För att kontrollera robotarmen anslut USB-kabeln till Raspberry Pi. Ställ omkopplaren på robotarmen
i läge on.
I ett terminalfönster skriv:
sudo lsusb
Nu listas de enheter som är anslutna till USB-porten varpå det är det dags att testa funktionen hos robotarmen.
Program för testning: path/roboarm-test.py
Exekvera: sudo python path/roboarm-test.py
Ytterligare ett testprogram: path/robotarm.py
Exekvera: sudo python path/robotarm.py
|
